折腾了一天,基本车架就完成了。图中主控NXP的ARM单片机。
小车底座原型做好啦。铝合金效果不错吧。
随后,制作了CX20106A的接收模块, 负责右边左边的信号接收
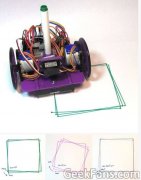
接着写出了基于Arduino版本的超声波跟随小车。搞出了第一代超声波跟随小车。
小视频,没怎么记录Arduino跟随小车的作品
第一代跟随小车是基于Arduino平台写的,优点是开发周期短,但是后面调试当中发现中断容易被自己干扰,寄存器操作不方便,修改底层函数也很困难,因为小车要和发射源时间同步,用红外做同步真心坑。还有就是中断不够用啊,总结出Arduino真不适合搞这玩意。 大家要是喜欢用Arduino搞的话,资料包有它的源代码。注释很多哦。 于是后面转战STC,手头有很多STC12系列的单片机,12系列的内部资源很丰富。符合设计需求。之前老师扔了一块亚博开发板给我。开发板体积刚好和小车螺孔匹配。装上去玩玩。 经过几天调试。第二代超声波跟随小车搞出来啦。 来看几张效果图 第一代跟随小车是基于Arduino平台写的,优点是开发周期短,但是后面调试当中发现中断容易被自己干扰,寄存器操作不方便,修改底层函数也很困难,因为小车要和发射源时间同步,用红外做同步真心坑。还有就是中断不够用啊,总结出Arduino真不适合搞这玩意。 大家要是喜欢用Arduino搞的话,资料包有它的源代码。注释很多哦。 于是后面转战STC,手头有很多STC12系列的单片机,12系列的内部资源很丰富。符合设计需求。之前老师扔了一块亚博开发板给我。开发板体积刚好和小车螺孔匹配。装上去玩玩。 经过几天调试。第二代超声波跟随小车搞出来啦。 来看几张效果图
正面
车头
车尾
方向与距离传感器
方向与距离传感器
凌承芯的2.4G无线单向通讯芯片
凌承芯的2.4G无线单向通讯芯片
凌承芯的2.4G无线单向通讯芯片
STC15F104W单片机
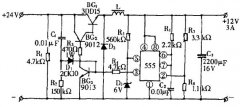
发射器用STC15C104W单片机作为核心,带锂电池供电、TP4052充电模块、升压电路。 发射器背面设计。 小车能在2米半距离内95%正确行走。超过2米半看使用者握发射器的姿势决定小车动向(其实五六米也没问题,要求目标短时间不动,车子自己跟上来,不会乱跑的)说那么多。还是用视频说话吧: 视频链接:http://www.ickey.cc/community/fo ... =1&extra=#pid387922 大家制作的时候应注意以下几点: 【1】CX20106A很容易干扰,可以尝试加大1脚电容(别太大),或者通过调节5脚脱离干扰源中心频率。 【2】动力部分和控制部分一定要大电源供应。别拿功率小的移动电源推动,没用的,最好分别双线供电。 【3】发射器方向推荐朝地面。得到反弹的波形效果更佳范围更大! 【4】电路图是用Eagle画的,所以要查看只能用Eagle哦。源文件自带此软件。 【5】关于时间同步。我是用2.4G无线模块(玩法类似315MHZ那种),只是简单的透传数字信号。大家可以尝试NRF24L01(笔者没采用,担心延时问题),也可以用红外同步时间。 【6】笔者的小车动力部分是舵机+Ardunio制作的(省钱)。大家不必和笔者一样玩法,看懂代码移植到你的平台就可以了。 |

























![[视频] FM胆电子管收音机的实验](/uploads/allimg/120910/1-1209101236340-L.jpg)
