认识六足机器人及多足机器人(2)
时间:2013-02-20 09:56 来源:hellorobot.blog.163.com 作者:懒猫侠 点击:次
六足机器人基本平台 的部件包括:
简单来说,舵机控制板就是机器人的中枢神经,负责动作协调,另外的机器人主控就是大脑,负责处理外界信息,统一指挥,机器人扩展的传感器就是感官系统,负责接收外界信息。舵机控制板并不是机器人的核心,它只是负责控制舵机的模块而已,功能再多也只能让机器人跳跳舞啥的,想实现机器人智能化必须要添加另外的主控,也就是给机器人装个大脑,什么样的主控呢:大家学的51,AVR,ARM单片机都可以作为机器人的主控,再在主控上添加各种传感器模块就相当于给机器人安上了口鼻眼耳等等,这样便初步形成了机器人的智能化框架
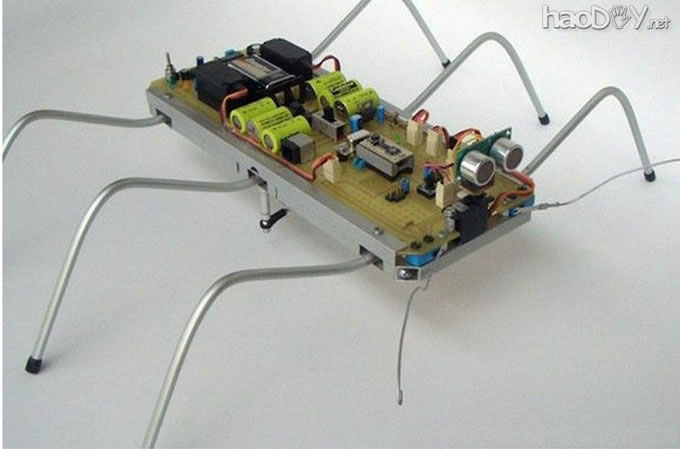
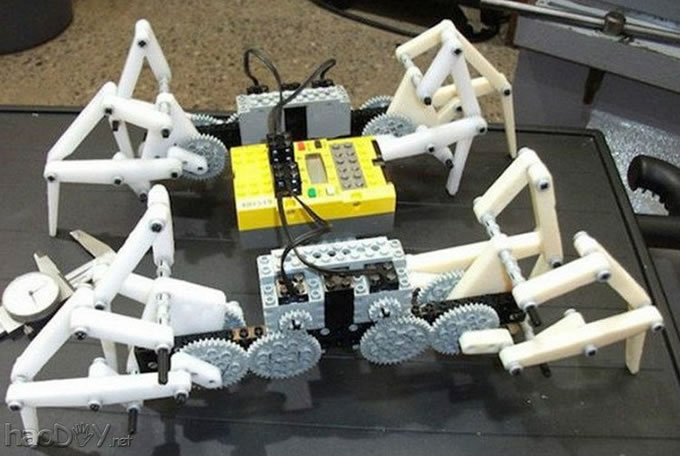
各种六足设计:
     (责任编辑:admin) |