|
����Ŀ���ܡ�
�벻������������Ϸ�һ�����ȿɰ���С�������أ������ĵ�ʱ��������Ϊ��“������”������һ�°������������顣�����������ҷ��������Ǿ�����BOB������һ������ǰ������Զ�����룬�ı��赸������3D��ӡ�����ˡ�
��Ʒͼ��

��Ƶ��
����Ŀ���ġ�
1.75mm PLA (1����) 3D��ӡ�IJ� ����ɫ��
DFBeetle������ 1
DFBeetleס��������չ�� 1
DFrobot SG90��� 4
Risym HC-SR04������ģ�� 1
DFrobot 3.7V﮵�� 1
DFrobot 3.7V﮵�س���� 1
��о�Ű��ߣ�10��ĸ-ĸ�� 1
�������ӹ�����װ 1��ѡ�䣩
���������衿
��һ���ֻ�е�ṹ
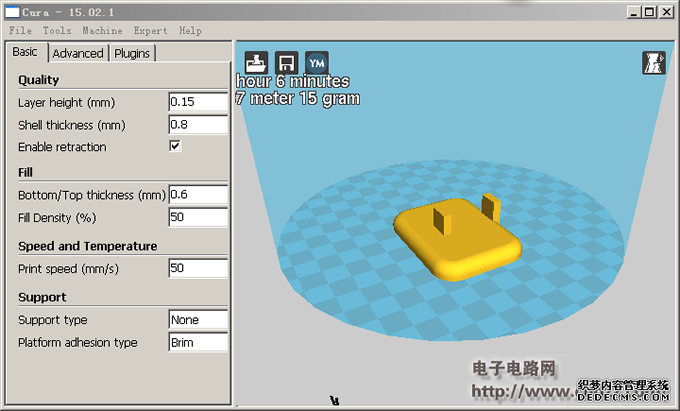
A.3D��ӡģ��
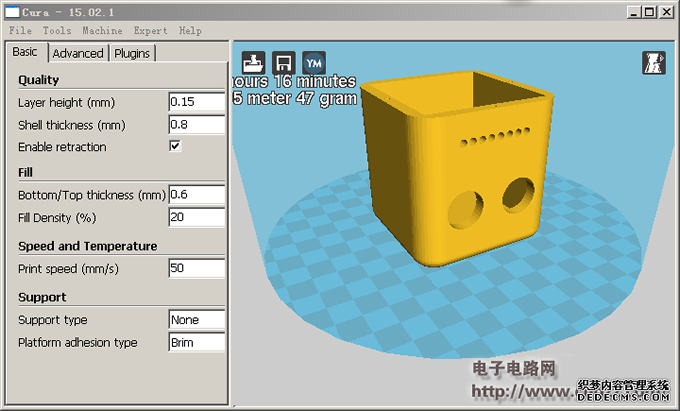
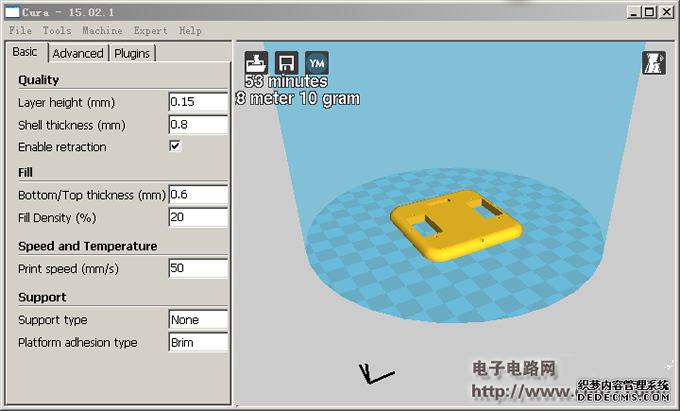
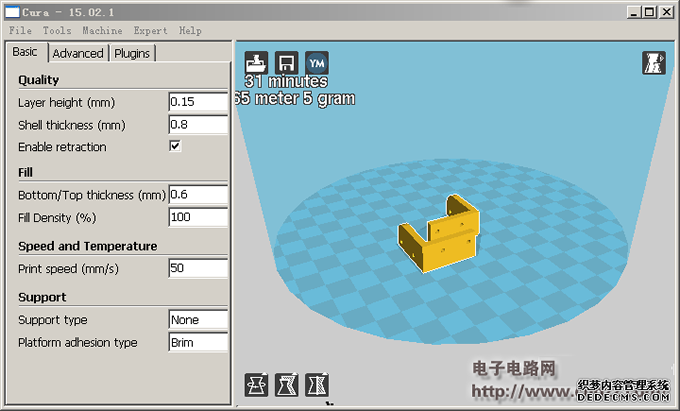
����3D��ӡ�����˹���4������ɣ�ͷ�����װ塢�Ȳ����Ų����������������Է���BOB���˶������е��ȶ��ԡ��ɿ����Լ���ӡ�����ʱ�䡢ԭ���ϵ����ģ��Լ�ǿ�ȵ��ۺϿ��ǡ��Դ�ӡ�IJ��������˲�ͬ������ʣ�������Ϊͷ��20%���װ�20%���Ȳ�100%���Ų�50%������������ͷ���͵װ��1�����Ȳ��ͽŲ���2����
B.�ṹ��װ
ͨ��3D��ӡ����ӡ����ĸ����ֵ����������ͼ��ʾ

�װ��е���ְ�װ
ȡ����ֻ���������ͼ��ʾ����װ����Ϊ�������ȸ����Ĺؽڿ��Ʋ��֡���ע�⣺��ӡ����Ȼ��Ҫ�ʵ���ģ��ʹ��ﱵ���������һ�¶���IJ�λ���Ա����ɵİ�װ�����

�Ȳ���е���ְ�װ
ȡ������ĵ�����̣�����ͼ��ʾ�ķ���װ���Ժ�����˿�̶�����ע�⣬�̶�������ת��ĵط�ʹ�ýϳ������˿����֤�����ת�������У��Ȳ������ܹ�ͬ��ת������

�Ų���е���ְ�װ��������ϼ�����������˿��2��������̶̹����Ȳ��Ĵ�ֱ���ڲ࣬

��ȡ����ֻ�����������ֻ��������ͼ��ʾ��

��������ϼ������ҽŲ������Ϊһ���壬��ʱBOB�°����Ѿ���ɻ�е�ṹ�İ�װ��

ͷ����ϰ�װ
ͷ���İ�װ�Ƚϼ�ֻҪ����ȷ�ķ���ͷ�������°����ϼ��ɡ�����Ч������ͼ��ʾ�����Կ���BOB�Ѿ����߳����ˡ�

�ڶ�����BOB���Ӳ���
�˴��Ƽ�ʹ�� �Ŀ��ư���Beetle��������Beetle��������չ�壬˵��Beetle���һ����İ������ΪDFRobotȫ��һ���Ϳ�����Beetle����ֻ��Ӳ�Ҵ�С���������Ĺ�����Ȼǿ��10�����ֿڣ�4��PWM,5��ģ�����룬2���Դ�˿ڣ��������Leonardo�ĸ�Ҫ�����Ÿ�λС���������һ��С�����۵Ļ�����Ʒʱ������Ϊѡ����ʴ�С�������������ա����������Beetle���ص��κ���Ʒ���У����籾���е�BOB��
Beetle���Ŷ���
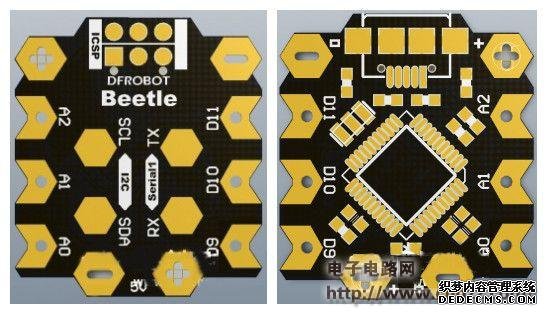
Beetle������PWM�ڷֱ�Ϊ��3��9��10��11������ע�⣺���ֿ�3��ӦSCL������Beetle ��չ������û��SCL�ģ������Ҫ�����Լ�����һ���߽�SCL��������ͼ��ʾ��

�ٽ�Beetle��������װ��Beetle��չ���ϣ����κ��Ӹ����š�

BOB�۾�����ʹ�õ���HC-SR04��������ഫ���������ĸ�����VCC��TRIG�� ECHO �� GND�ֱ��ú졢�����ơ����ĸ��Ű���������

��·���ߣ�
������ߣ����ҽŲ��������Ž����ֿ�11���ҽŽ����ֿ�3���������ֿ�3�����������ģ����Խ�������SCL���������ҽŶ�������ֿڣ��ٽ���VCC��GND������չ�壩�����Ȳ��ֶ�����Ƚ����ֿ�10�����Ƚ����ֿ�9��
���������ߣ���������������VCC\GND\Echo\Trig���ŷֱ����չ���VCC\GND\A0\A1�ڡ�
���߽Ӻ��Ժ���¼һ�³����������ʼλ��Ϊ90�ȡ���ע��Beetle��������Board����ΪArduino Lenardo��
�����������
����:
Beelte����ʹ�ã������³�����ڵ������Ҳ���Beetle������ڣ�
ԭ��
���ų��������������һ�����³���Ӱ����USBͨѶ���¡�Beetle/Leonardo��USBת����������Ӧ������ʵ�ֵģ�Arduino IDE��ʵ�֣��������û�������ATMEGA32U4�У�����û�����Ӱ����USB����ز��������¿�����USB����ڡ���ʱ��Ҫ���¼��ؿ��õ��û�������Blink���� ����Beetle/Leonardo�Ѿ��͵���ʧȥ��ϵ�������Զ���λ����Ҫ�˹���λ��ʽ���м��ء�Beetle�ĸ�λ��Ҫͨ�����߶̽�ICSP�ӿ��е�RESET��GND��ʵ�֡� ע��Beetle/Leonardo�ϵ�����ʱ��ֱ�������û��������ͨ�����USB����ʹ�����Bootloader��
������
�ֶ���λ���س�����̣�
1)��Arduino IDE�д�blink����������ѡ��Ϊ“Leonardo”�����“upload”���س���
2)��IDE����ʾ“uploading”ʱ�������߽�������λ����ICSP�ӿ��е�RESET�͵ض�·һ�º�Ͽ�����
3)�ȴ����������ϡ�
����������
��3.7V﮵�� ������������Beetle��չ��ĵ�Դ�ӿ��ϣ����¿��ء�BOB ����ǰ������ľ��룬������ͬ���赸��
���ܽ���չ��
����BOB�����αȽ��й��оأ�������в����Ĵ�����Է��ӳ�����������Ի���BOB�������ڹ����ϣ�����Ҳ���Խ�����չ������������ֻ�Ǹ�BOB�ƶ������ֶ�����������ij�������������Ļ�ʽ����BOB�����������衣���Ӹ�MP3����ģ�飩�������������ֻ��������BOB����ô����Bluno Beetle���ذ���������BOB������ᣩ

|


![[��Ƶ] 2p2���ӹ�������](/uploads/allimg/120910/1-1209101239420-L.jpg)
![[��Ƶ] lm3886���Ű��ϵ���](/uploads/allimg/120908/1-120ZR03Q9513-lp.JPG)
![[��Ƶ] LM4780 ��������](/uploads/allimg/120909/1-120Z9151U90-L.jpg)