|
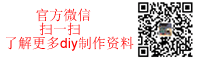
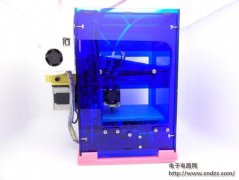
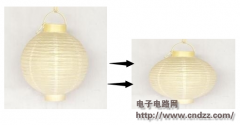
如果你觉得人形机器人制作很复杂,那么试试机械臂吧,假如你还觉得困难,那么这款单伺服蠕动机器人就是你最后的选择了。它只靠一个舵机控制行走,一块Arduino mini和3D打印部件是它整个身体的主要组成部分,在完善设计的同时为后续的搭建开发提供了一个平台。它可以前进以及引导左和右,现在它还没有传感器,只能直线行走,后续可以增加两个光传感器或者添加一个距离传感器,这样它就可以自我控制左右和避开障碍了
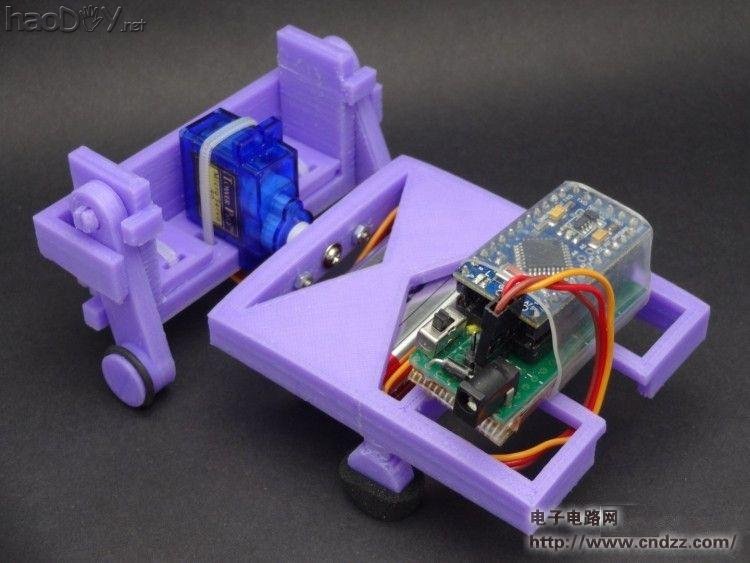
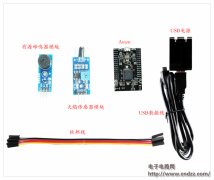
项目材料:一块一块Arduino mini控制板 一台3D打印机(打印机器人3D部件) 一块锂电池 三条捆扎带 一个9克舵机 一块洞洞板焊接的扩展板(包含整流二极管1个、开关1个、5v充电插口1个、排针和插座) 热熔胶枪 透明热缩管 O型密封圈2个
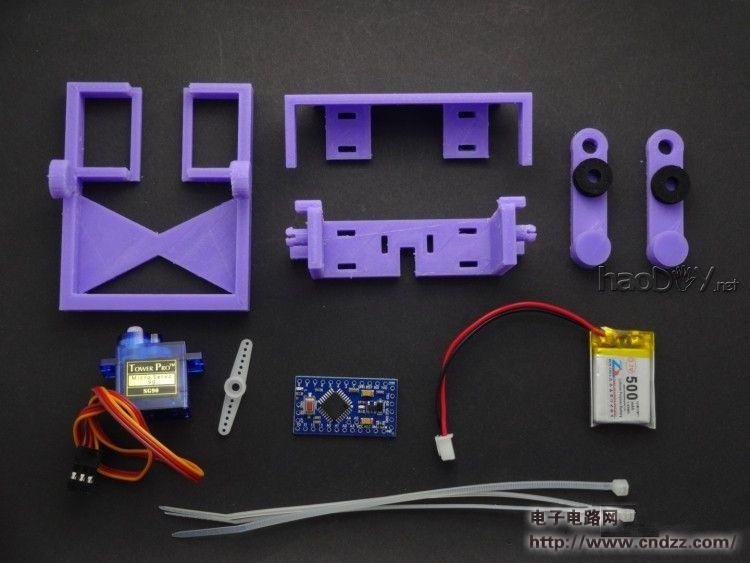
【制作过程】 第一步,打印机器人主体结构部分。 1、用1.75mmPLA线材打印机器人结构主体,将打印填充率设置为70%。
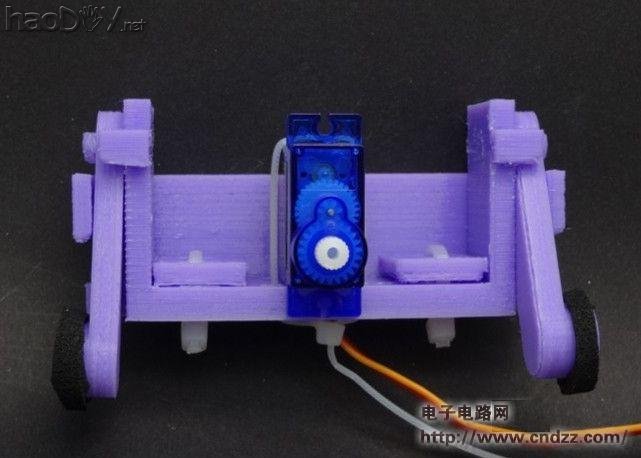
2、将机器人两前腿装上O型密封圈(我这里用海绵圈代替),接着把两腿装入头部活动支架,安装好舵机座。
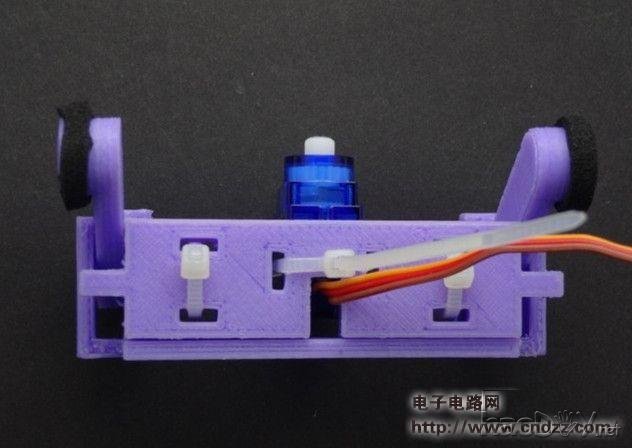
3、用3根捆扎带分别将头部活动支架和舵机固定起来,并把舵机伺服转角用螺丝安装好。
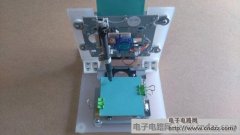
4、将机器人头部和身体用螺丝与舵机转轴链接起来,考虑到控制板和电池质量较轻,机器人身体平衡和脚部摩擦力下降,影响蠕动机器人前进行动的速度,这里我用一块废旧9V电池安装在底盘上来调节重心,为了美观我并没有用捆扎带来固定电池,而是用热熔胶固定。
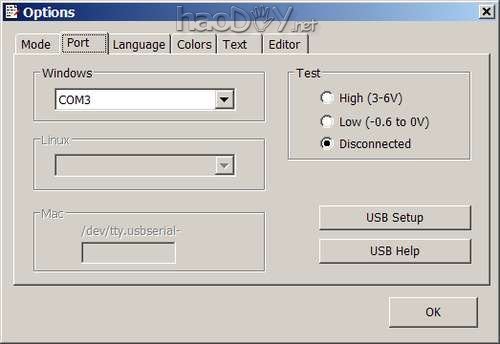
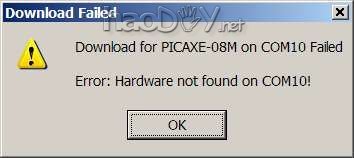
第二部分,Arduino控制扩展板焊接。 内容有点多,放在附件里了!
|
























![[视频] LM1875 功放制作](/uploads/allimg/120908/1-120ZR132390-L.jpg)

