|
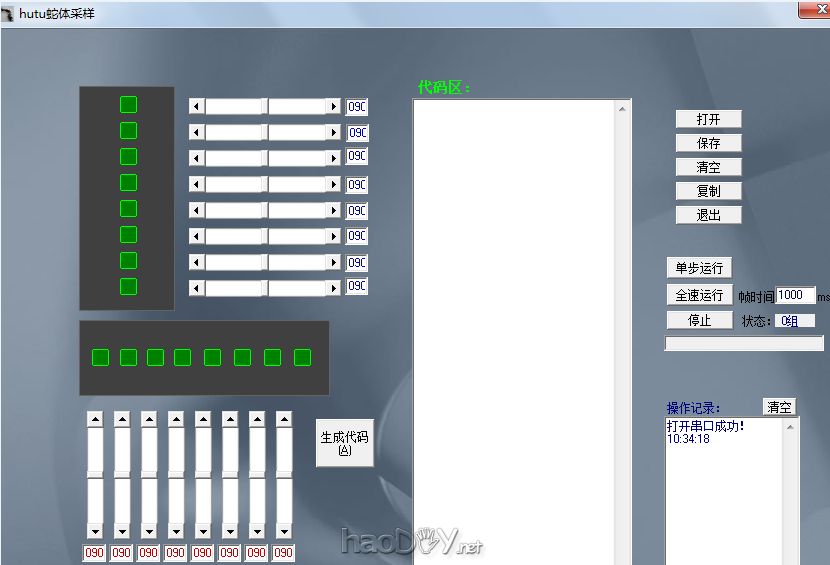
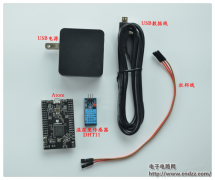
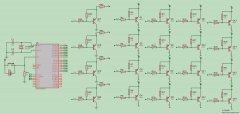
此蛇形机器人能实现二维s 形运动、蠕动、翻转,自动避障前行,三维爬树勘测等运动。初始时,接通电源开关,蛇形机器人程序初始化,不做任何操作。其处于自动避障模式,当你用上位机 软件或遥控器控制时按任意键蛇形机器人自动切换到受控模式,爬树功能的实现是在受控模式下进行的。 蛇形机器人硬件组成: 蛇形机器人共:17个舵机,两片M8,一片nrf905无线模块,2.4G无线摄像头,三节高放电量锂电池,连接件若干。 上位机:运动代码生成软件,控制软件一套,2.4G无线接收,USB视频采集卡,nrf905+m8+max232控制盒一个。 蛇形机器人运动生成代码软件如截图:
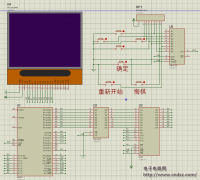
蛇形机器人运动控制界面如截图:
附件内容包括: 多路舵机单片机程序源代码; 蛇形机器人操作界面VB源码,包涵摄像头简单识别颜色; 蛇形机器人运动生成代码软件(VB源代码); 相关参考论文设计等; 如截图:
资料下载地址: 本资料来源于互联网 【更多项目】
|