数字PK模拟 对比基于不同控制理念的两只爬虫机器人(3)
时间:2013-02-21 11:16 来源:digi01.blog.163.com 作者:digi01 点击:次
表1的控制思路相对简单。当机器人冷启动以后,随时序的进行,在同一时刻只有一只电机在运转,驱动爬虫向前行进。比如,左前腿处于抬起的状态(头部电机正转),随之而来的事件是右后腿抬起(尾部电机反转)。这是一个比较谨慎的控制方法,它的优点是两只电机之间的逻辑关系非常清晰,相互之间影响少,无论从模拟控制的角度还是数字控制的角度都比较容易实现。它的另一个优点是机器人的功能扩充非常灵活,只需要通过传感器来改变其中一只电机的时序,就可以使爬虫做后退和转弯等复杂的动作。 三,制作机器人的骨架
1,制作数字爬虫的骨架。
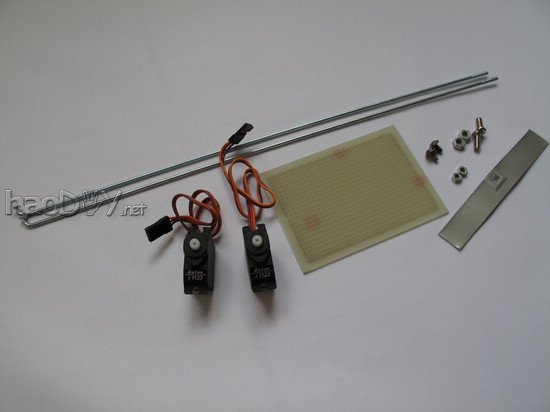
所需材料:
图二,准备好制作数字爬虫骨架所需的全部材料。 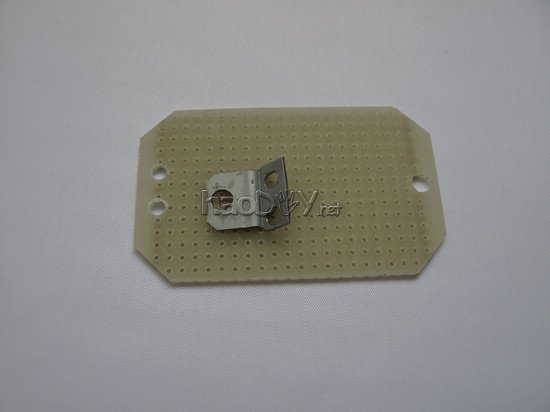
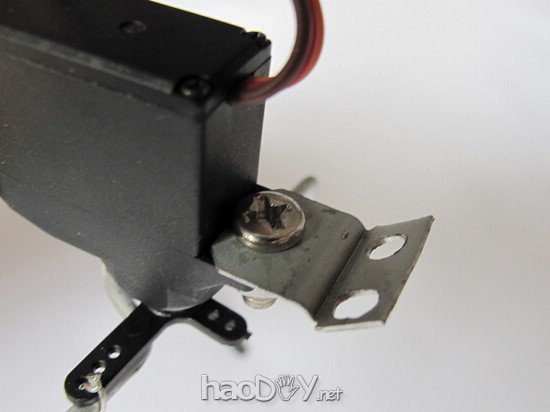
图三,爬虫头部的舵机需要抬起30度角,我使用废光驱外壳的铁皮做了一个简单的结构件。把洞洞板裁剪成适当尺寸,作为爬虫的身体。
图四,加工好的结构件固定在爬虫的头部舵机上的示意,这个结构件也起到头部舵机与爬虫身体之间的连接和固定。
(责任编辑:admin) |