数字PK模拟 对比基于不同控制理念的两只爬虫机器人(5)
时间:2013-02-21 11:16 来源:digi01.blog.163.com 作者:digi01 点击:次
|
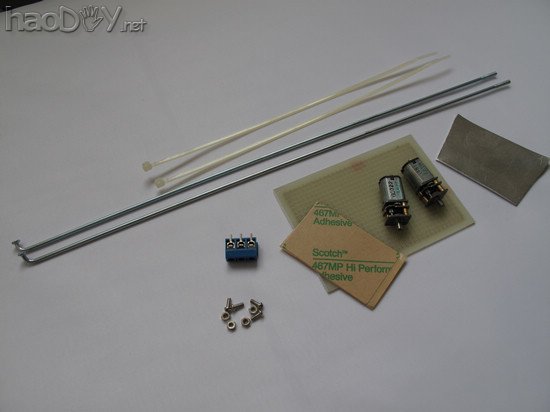
所需材料
图九,准备好制作模拟爬虫骨架所需的全部材料。
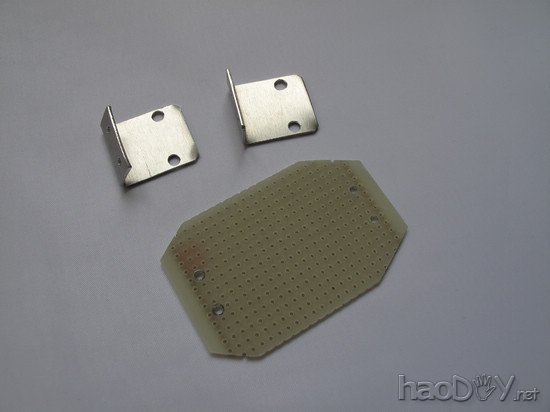
图十,为了固定减速电机,需要用铝板加工两个支架,一个90度的,安装尾部电机,一个60度的,安装头部电机。
图十一,同样使用洞洞板做为爬虫的身体,左侧为机器人头部。借助尼龙扎带和螺丝固定好两只电机。 模拟爬虫的驱动部分使用两只N20型减速电机,5V电压下转速30RPM,接近9克舵机的转速。与数字爬虫相比,减速电机的固定和输出轴与腿部的连接,就没有舵机那么方便了,需要自己加工一些小零件。
图十二,把质量较好的双面洞洞板裁成3X3孔的两小块。
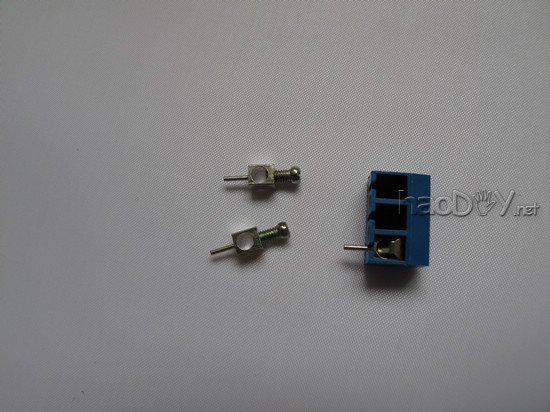
图十三,从压线端子里拆出两套铜芯,保留螺丝。铜芯的压线孔刚好可以配合上减速电机的输出轴。 (责任编辑:admin) |