数字PK模拟 对比基于不同控制理念的两只爬虫机器人(6)
时间:2013-02-21 11:16 来源:digi01.blog.163.com 作者:digi01 点击:次
|
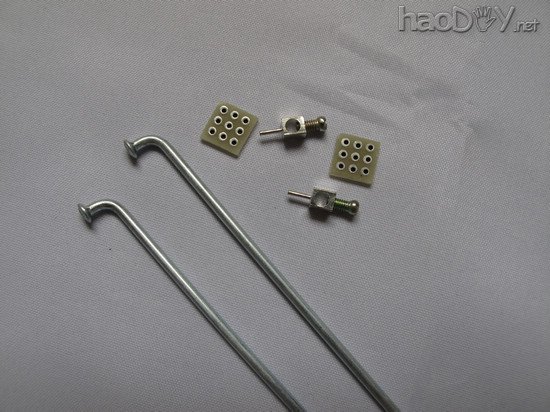
图十四,借助3X3孔的洞洞板,把车条和铜芯焊接固定在一起。
图十五,爬虫腿部,自制简易轴连器的细节。
图十六,制作好的模拟爬虫前腿组合与后腿组合。 四,电子部分与总装 1,制作数字爬虫的控制核心
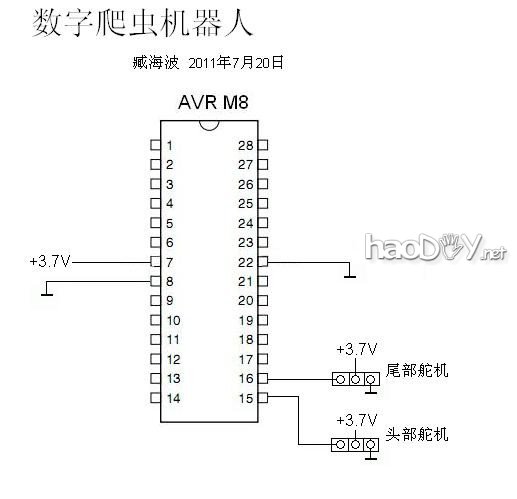
图十七,数字爬虫的线路图。 元件清单:
图十八,准备好数字爬虫电子部分的元件。 (责任编辑:admin) |