自制金刚狼爪模型!变身超级英雄 附视频
时间:2017-04-23 07:56 来源:未知 作者:admin 点击:次
第一步:材料准备
材料
工具
软件
第二步:打印爪子在GitHub资源库中下载3D·STL文件,如果你有一台3d打印机的话可以直接打印,如果没有可以到市面上找一些3D打印店帮你解决这个事情。打印出来的实体可能需要一些打磨和修整,这取决于打印的质量。
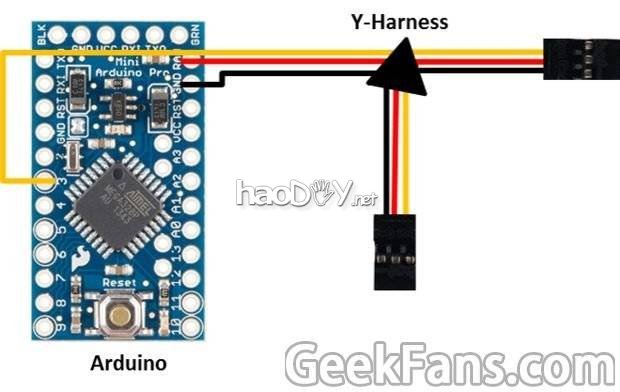
第三步:连接Y-harness伺服线我们需要将Y-harness伺服线连接到Arduino板上。首先要切断Y-harness线的母线,然后连接电池。 红色的线连接Arduino,黑色的线接地线,黄色接RAW引脚。
剪掉多余的线。
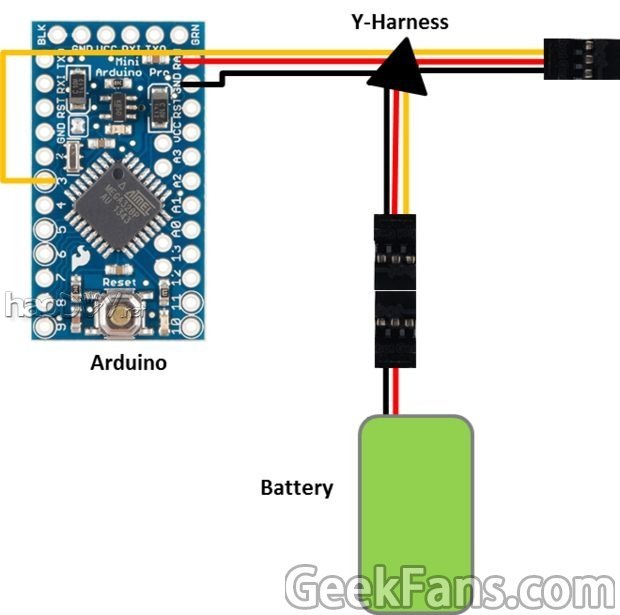
第四步:测试Y-harness伺服线的布设1,将电池插入Y-harness线的两个插槽中的一个。
2,Arduino的电源指示灯打开,如果没有反应,迅速断开电源,检查连接线。 3,测试另一个。 4,在Github中下载SweepMod草图,并在Arduino IDE中打开。 5,在Arduino IDE中点击工具,设置。 6,上传草图到Arduino中。
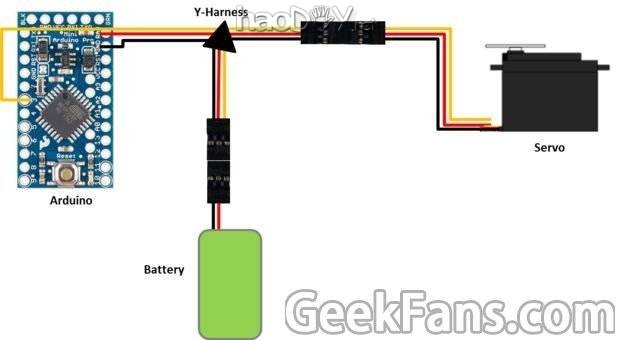
7,断开电缆和插头,将电池卸下。 8,将Arduino打开单独测试。 第五步:在肌肉传感器上连线1,测量从手腕到肘部的距离,剪掉多余的线。 2,将黄线接入肌肉传感器的输出信号引脚(SIG),红色线插入电源引脚(+),黑色线接地线(-)。
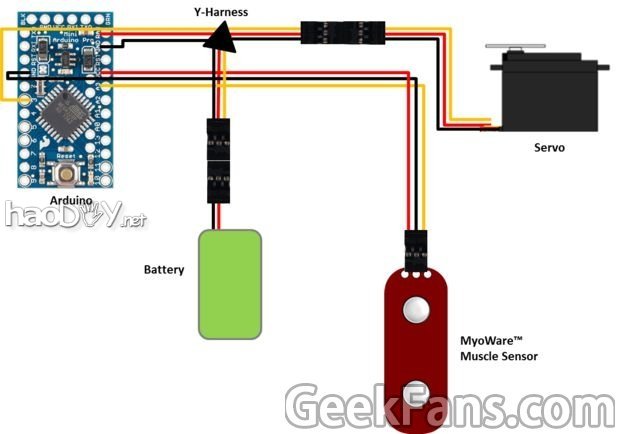
3,将线路焊接。 第六步:连接MyoWare肌肉传感器将MyoWare肌肉传感器连接到Arduino板上,要注意的是,传感器的电压不能太高,需要时用Arduino内置的5V稳压器为MyoWare供电。
1,将红线连接到VCC引脚,黑线接地线,黄线到A3模拟引脚。 2,剪掉多余的线。
第七步:测试MyoWare肌肉传感器需要确保上传到Arduino上的代码以及安装程序正确。 将三个电极传感器贴在臂上,要保证测试时,肌肉没有变化的情况下第一个指示灯亮起,肌肉有变化的时候第二个LED指示灯亮起。
第八步:上传Arduino草图1,用5V FTDI编程电缆将Arduino和一台电脑连接起来。
2,从GitHub上下载草图并用Arduino IDE打开 3,上传草图。 第九步:测试电子开始电子元件的组装,我们需要确保各个电子部件工作正常,测试各个部件的动作以及保证程序代码的正确。
第十步:将盒子打孔并处理
在打印好的外壳上,前部正面翼片的中间用钻机各打两个孔,用3/16"的螺丝测试孔的大小,然后卸下。 外壳的内部也需要打洞,这两个洞需要使用准备好的3/4"螺丝钉。
在盒子底部贴上魔术贴。
第十一步:安装 (责任编辑:admin) |