|
|

|
|
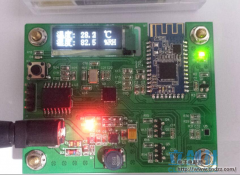
1.教程说明 心率计可以将检测到的心率数据传输至手机端和WEB端,从而实现心率的实时监...
最近有点忙,可还是腾出空来打造了一款单片机32位LED花样流水灯!......................
最近这段时间比较闲,特地将原先做的LED时钟升级一下!先上照 正面 反面 本次做的LED...
最近帮别人设计了一下毕业设计,就是温度检测、报警系统,具体的题目就不贴出来了。公...
电路设计: 图1是单片机最小系统电路;图2是驱动电路。共10路光源DS1~DS10,分别由AT8...
免费提供各种电子制作文章、资料、图纸...
 【转载】绚丽光立方设计,原创8x
更新:2017-05-10
【转载】绚丽光立方设计,原创8x
更新:2017-05-10
 耗时一个月,用单片机打造的电子
更新:2014-12-22
耗时一个月,用单片机打造的电子
更新:2014-12-22
 如何使局域网/以太网使用Arduino
更新:2017-05-17
如何使局域网/以太网使用Arduino
更新:2017-05-17
 硬盘时钟+镜面旋转,最美时钟出
更新:2017-05-11
硬盘时钟+镜面旋转,最美时钟出
更新:2017-05-11
Powered by DedeCMS_V57_GBK_SP2 © 2004-2017 DesDev Inc.

桂公网安备 45090202000109号
Power by DedeCms 桂ICP备17003894号-1